Fraunhofer Institute of Optronics, System Technologies and Image Exploitation
Fraunhofer Institute of Optronics, System Technologies and Image ExploitationOCTANE at the “IAA Mobility 2021” in Munich
Sep. 6, 2021


Octane was part of the IAA Mobility 2021 on September 6, 2021. We showcased the latest OCTANE version together with our VERTEX test vehicle at the Fraunhofer booth.
Information about VERTEX – Test vehicles for technology experiments:
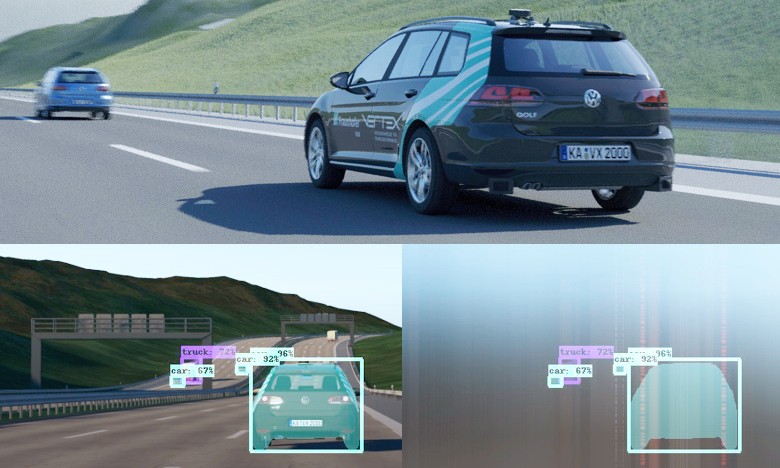
The VERTEX research vehicle on display, together with its electrically driven sister vehicle, is one of two Fraunhofer IOSB Golf VII vehicles equipped for fully automated driving. Both feature redundant 360° equipment of various environmental sensors, including camera, radar and LiDAR technology, as well as the ability to access the vehicle's own CAN bus for automated longitudinal and lateral control. The »test vehicles for technology experiments« are used in research projects for automated and connected driving, cyber-safe cooperative driving via imaging light communication, simulation, and in the field of human-machine interaction.