Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung - Projekt OCTANE
Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung - Projekt OCTANEOCTANE auf der »IAA Mobility 2021« in München
6.9.2021


Octane war am 6. September 2021 Teil der IAA Mobility 2021. Wir präsentierten die aktuellste OCTANE-Version zusammen mit unserem VERTEX-Versuchsfahrzeug auf dem Fraunhofer-Stand.
Informationen zu VERTEX – Versuchsfahrzeuge für Technologieexperimente:
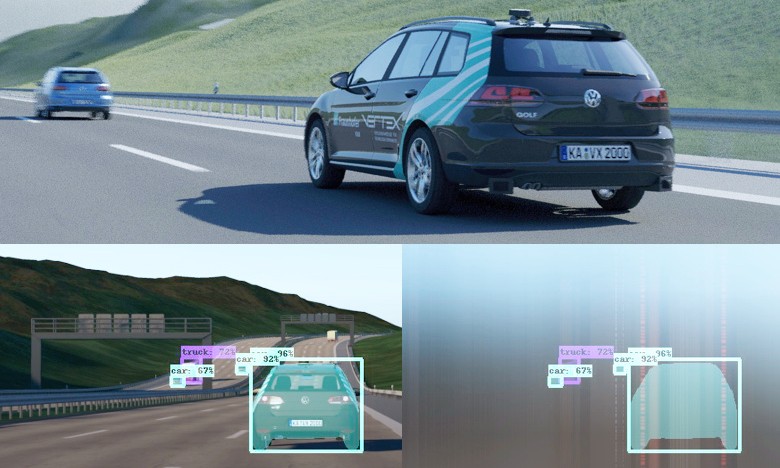
Das ausgestellte VERTEX-Forschungsfahrzeug ist, zusammen mit seinem elektrisch angetriebenen Schwesterfahrzeug, eines von zwei für vollautomatisiertes Fahren ausgestattete Golf-VII-Fahrzeuge des Fraunhofer IOSB. Beide verfügen über eine redundante 360°-Ausstattung unterschiedlicher Umfeldsensoren, darunter Kamera-, Radar- und LiDAR-Technik, sowie die Zugriffsmöglichkeit auf den fahrzeugeigenen CAN-Bus zur automatisierten Längs- und Querführung. Die »Versuchsfahrzeuge für Technologieexperimente« finden Verwendung in Forschungsprojekten für automatisiertes und vernetztes Fahren, Simulation, cybersicheres kooperatives Fahren über bildgebende Lichtkommunikation sowie im Bereich Mensch-Maschine-Interaktion.